












Product Consultatio
Quisque sit amet nisl. Required agri notata *


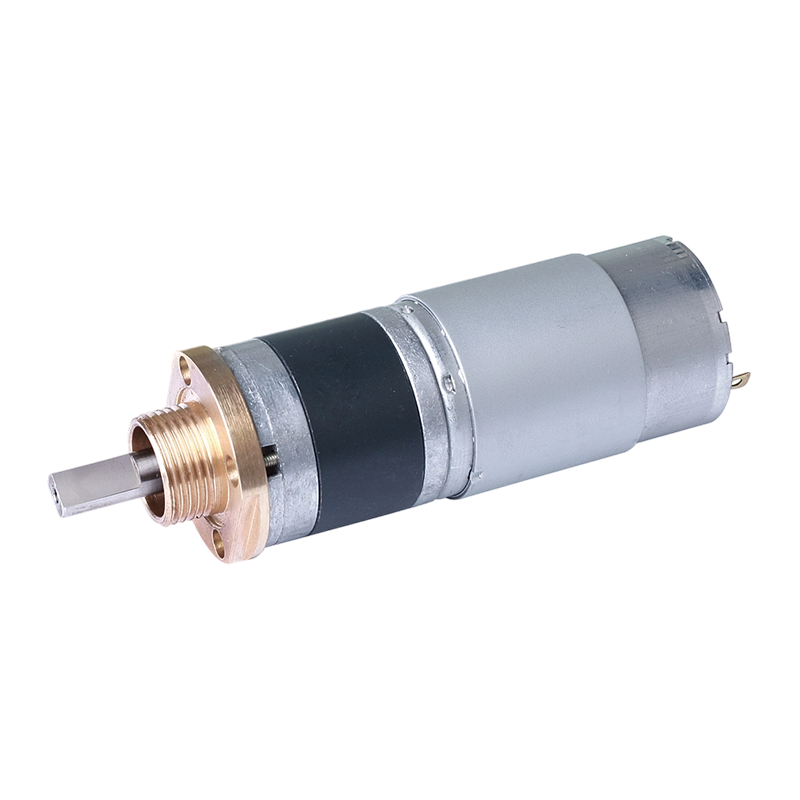
A DC calces motoris est motor electrica directus-currentis cum calces mechanicis in unum integratum unitatem. Motor ipse celeriter trahit — saepe 3,000 ad 15,000 RPM ad aestimationem intentionis — at pleraeque applicationes reales mundi tardae, motu substantiali vi conversionis moderatae indigent. Gearbox hoc solvit celeritate mercando torques per seriem anni mescendi. Effectus est scapus output, qui multo tardius quam rotor motoris vertit, sed proportionaliter torques in scapo superiore praesto est.
Sine calce, parva dc motoria laminam ventilabrum facile nere potest sed certat onus levare, cingulum trahere vel valvulam vertere. Cum deminutione phaleris, dic 100:1, idem motor qui 5 mN·m producit torques liberorum currentium nunc circiter 500 mN·m in output tradit — minus damna ex reticulo calces attritu, typice 5-20% pendens typum calces et lubricationis. Multiplicatio illa torques, compacta cum integratione motoris et gearbox in unum conventum, est cur motores DC apparatus inter latissime specificatos motus componentium in applicationibus industrialibus, commercialibus et consumptoribus sunt.
Consilium gearbox maiorem ictum in perficientur, magnitudine, efficientia, et strepitu habet quam paene aliud consilium variabile. Quattuor configurationes dominantur in foro.
Calcar anni recti sunt dentes incisi axi paralleli scapo. Formae calces simplicissimae et minime pretiosae sunt fabricandi, quae calces DC motores calcar facit defectum electionis ad applicationes sumptus-sensitivas. Praecipua earum infirmitas est strepitus: quia latitudinis plena densitas in unoquoque reticulo contactu simul versatur, anni calcaria propria crepitu magna celeritate efficiunt. Efficientia bona est — plerumque 95-98% per stadium — et modice radialia onera bene tractant. Calcar motores calces communes sunt apud typographos, nugas, machinis vendendis, et actuatores leves ubi quieta operatio prioritas non est.
Gearbox planetarius plures annos "planeta" circa central "sol" calces disponit, omnia intra calces anuli contenta. Quia onus per plures anni planetae simul communicatur, planeta DC calces motoris altissimas torques densitatis in pacto, sarcina coaxial liberat. Scapus output cum scapo motorio est varius, qui institutionem simplificat in layout spatiis constrictis. Gearboxes planetae rigidiores sunt et accuratiores quam calcar aut vermis genera, quibus praeferuntur electiones roboticae, automated vehiculis ducti (AGVs), electricis vertitoriis, et omnem applicationem quae alta torques, stricta accuratio positionalis et longam vitam inserviunt. Negotiatio sumptus est: signanter gearboxes planetae pretiosiores sunt ad producendum quam calcar vel helicas rationes in eodem æstimatione torque.
Vermis gearbox utitur cochlea-similis scapo vermiculi qui reticulum cum rota verme ad angulum 90-gradum. Haec figuratio altissimas rationes reductionis in uno stadio consequitur — vulgo 5:1 ad 100:1 — et naturalem sui ipsius densis notam praebet: cum motor cessat, onus non potest calcem repellere. Hinc vermis calces DC motorum specimen applicationum facit ubi onus positio sine potestate tenere debet, ut garage aperientium ostium, scaena levat, actus hospitalis lectus actus et claustra securitatis. Praecipua limitatio est efficientia: reticulum retis vermis attritus altus est, cum typica unius scaenae efficientia ab 50-90% angulo plumbi pendente, cum rationibus superioribus minus gradatim efficiens. Motores vermes calces etiam significantes calorem efficiunt sub continuum summi oneris cycli officium.
Anni helicae dentes angulum ad axi stipite secabant, contactus inter dentes gradatim et gradatim magis quam abruptus est. Hoc dramatically strepitum et vibrationem reducit ad anniculos calcarendos et ad facultatem oneris leviter melioris ob maiorem aream contactus efficacem. Motores helices DC calces communes sunt in applicationibus quae quietiorem operationem requirunt - TRADUCTOR agit, machinamenta sarcinaria, et instrumenta medica. Coniunctiones helicae coneris permittunt ut stipes output in 90 gradus motori, similes vermiculo pellenti, sed cum efficacia superiore (typice 94-97% per scaenam). Auctus fixus axialis ex reticulo calces helicae generatus requirit gestus qui hoc onus tractare possunt, quod leviter addit ad unitatem sumptus.
Ipsum elementum motorium DC in duas architecturas fundamentales venit, et electio inter eas afficit sumptus, sustentationem requisita, celeritatem extensionis, vitam servitii signanter.
| Feature | Motor dc Gear Peniculus | Brushless DC Gear Motor (BLDC) |
| Ratio commutationis | Mechanica (commutatorem ipsum perterget) | Electronic (ESC vel motor exactoris) |
| Typical Service Vita | 500-3,000 horas (penicillo lapsum limited) | 10,000-20000 horas |
| Imperium complexionem | Simple - voltage aut PWM direct | Dedicated BLDC exactoris requirit / ESC |
| Efficientia | 75-85% typicam | 85-95% typicam |
| sonitus & EMI | Superior (generat Peniculus arcing Tactus) | inferiora |
| Unit Pretium | inferiora | Superiore (motor exactoris) |
| Typical Applicationems | Nugas, adjumenta, lux automation | Robotics, AGVs, arte medica, EVs |
Ad prototyping vel humilis-officium applicationes intermittentes, motor scopulorum DC calces a simplici L298N vel TB6612FNG H-ponte agitatus est velocissimus, vilissimus via ad systema operantem. Quaecumque enim continenter currit, in ambitu aspero operatur, aut in agro sine sustentatione durare debet, motrices dc calces Brushless — quamquam superiores sumptus electronici et additi aurigae — fere semper meliores summas dominii sumptus tradit.
DC schedae motoriae datae densae esse possunt, sed quinque parametri decernunt num motor in applicatione tua operabitur. Intellectus quisque impedit errata lectio frequentissima.
DC calces motorum ordinantur ad certae intentionis copiam — plerumque 6V, 12V, 24V, vel 48V in applicationibus industrialibus et amabam. Motricium signanter operans supra suam intentionem aestimatam accelerat penicillo indumento in typos obsito, anfractus overheats, et breviora vitam ferens. Operans infra intentionem aestimatam reducit torques promptos et motorem stabendi sub onere causare potest. Pro altilium-powered systemata, intentioni motoris aestimatae inserere intentioni pugnae nominalis ad medium crimen, non ad plenum crimen, ad vitandum overvoltage in summo cycli criminis. A 12V dc calces motoriis currendo ex 3S LiPo recenter accusatus (12.6V) marginaliter acceptus est; curfum a 4S sarcina (16.8V) cito delebit.
Celeritas nulla onus est output scapi RPM cum motor currit ad voltage aestimavit cum torques zephyro applicato. Sub ipso onere, celeritas guttae — typice ab 10-20% in torquibus (continuis) aestimatis, et ab usque ad 50% ad apicem stamenti torques. Cum calculare num DC apparatus motoriis onus movere possit in celeritate debita, semper utere onerato cursu tuo expectato puncto operante torque, non figura nulla. Manufacturers interdum nonnisi summam celeritatem et torquem armenti enumerare; onustum punctum operativum in media curva velocitatis fere cadit.
Aureus aestimatus (etiam Aureus continuus dictus) maximus est torques motoriae indefinite sine overheatione liberare potest. Torqueus stallum est torques cacumen productus, cum harundo stationarius tenetur — typice 5-10 temporibus censitorum torques pro scopulis DC calces motoriis. Aureus equilis utilis est ad sarcinas cacumina intermittentes considerandas (vis necessaria valvae fixae solvendae liberae, exempli gratia), sed operans continue ad vel prope praesepium motorem celeriter excalfaciet. Elige motorem cuius torques aestimatus est saltem 20-30% supra applicationem tuam expectata continuum onus torques. Haec salus frictioni variatio, voltage sag, et temperatura decurrentis rationem reddit.
Ratio calces exprimit quot revolutiones spiculi motoris unum output scapus revolutionis efficiant. Proportio 50:1 significat output semel pro singulis vicibus 50 motor. Rationes calces superiores efficiunt celeritatem inferiorem output ac maiorem output torquem. Nihilominus rationes altissimae gradus magis calces inducunt, quae attritionem damna augent et backlash - parva copia liberi ludi in output stipite cum directione adversa. Ad applicationes positionis, backlash specificatio critica est: calces planetarum typice offerunt 0.5-3 arcus minutas backlash in praecisione graduum, cum oeconomia calcaria gearboxes habere possunt 1-5 gradus backlash, quod est inconveniens pro omni positione iterabili requirente.
Officium cycli describitur recipis temporis motoris operans versus quiescit intra tempus datum cycli. Motor motor aestimatus pro S1 (officium continuum) indefinite currere potest ad onus aestimatum sine overheating. S2 (officium breve tempus) et S3 (officium periodicum intermittentibus) aestimationes permittunt altiores fastigium potentiae gradus, quia motor per intervalla longinqua refrigerat. Semper aequare officium motoris aestimationem actui tuo cycli operanti - motor aestimatus pro 30% officio cycli aestuabit ac deficiet si continue currit, etiamsi torques et velocitas intra limites nominatim sunt.
Intentione lectio saepe a fonte praesto potentiae magis quam a motore praecedente pellitur, sed casus typicos usus intelligens singulis ordine intentionis adiuvat ut optiones tuas cito coartes adiuvet.
Lectio motoris primum ius questus pretiosos redesignes vitat et agrum inauspicatum. Sequere hanc practicam compagem:
Adice torquem applicationis tuum ad output vecte requirit. Ad robot rotatum, hoc significat vim computandi ad massam roboti accelerandam, attritionem volubilem superandam, et ascendendum quaelibet inclinatio in operatione expectata. Pro actuator lineari, vim cochleae plumbeae calculate et eam ad torques motoris per plumbi et efficientiam cochleae converte. Adde marginem 25-50% salutem ad rationem frictionis variationis, senescentis, ac pessimo casu missionum onerantium. Hoc signum torques numerus — margine apposito — fit tua specificatio Aureus minimus aestimatus.
Minimum et maximum output hastile constitue celeritatem applicationem necessitatum tuarum. A TRADUCTOR qui productum movet ad 0.5 m/s cum 50 mm diametro, cylindrus agitator requirit output celeritatem proxime 191 RPM (0.5/ (π 0.05) × 60). Motorem eligere, cuius celeritas nulla onus est, saltem 15-20% supra onustam celeritatem requisitam ut motor non operans prope praesepe sub condicionibus normalibus.
Utere hoc consilio dux ut par gearbox genus ad applicationem requisita:
Compesce ut potentia tua copia apicem currente postulatio motoris in stabulo eripere possit. Stabula current pro motoriis DC calces reiectis proprie est 5-10 temporibus in nullo oneris currentis. Si copia tua non potest hunc currentem obiter in satus vel impedita condiciones ordiri, adde motorem currentem limitantem cum termino opportuno, vel motorem exactorem cum adaequato capitello elige. Ad motores calces Brushless, BLDC coegi continentem et apicem currentium confirmant aestimationes motoris requisita cum saltem 20% margine excedunt.
Standard dc calces motorum non sunt signati. Si motor patebit pulvis, umor, refrigerium fundent, vel condiciones lavatorias, designabit unitatem IP aestimatam - IP54 pro pulvere et tutela fundes, IP65 vel IP67 pro ambitus magis exigendo. Ad cibum processus, medicamenta pharmaceutica, vel applicationes marinae, confirmant gearbox ducatus congruentia requisita regulatoriae occurrere (NSF H1 adipes cibi-gradus pro zonis contactu cibi, exempli gratia). Temperatus range operans etiam momenti est: motores vexillum pro ambientium 0-40°C aestimantur; apothecae frigidae vel officinae velit in climatibus septentrionalibus, adipes temperaturas specificationes et temperaturas curvas confirmant.
DC motores apparatus apparatus productorum et systemata immane apparent. Intellectus ubi communiter adhibentur adiuvat ad cognoscendum congruentia designationes et figurationes convalidandas.
| Industry | Application | Typical Apparatus Motor Type |
| Robotics & AGVs | Coegi rotas, actus iuncturam, machinamenta gripper | Planetarum brusarum, 24v-48V |
| Industriae Automation | Vectores, tabulae indexing, actus valvae | Helica, vermis vel planeta, 24V . |
| Medicinae machinae | Infusio soleatus, instrumenta chirurgica, stratoria valetudinaria | Brushless planeta, low-backlash, 12V-24V |
| Automotive | Potestas fenestras, sedes adapters, sunroof agitet | Vermis setis vel calcar, 12V |
| Dolor Electronics | Camera pan/tilt, actores domus callidi, impressores | Calcar, 5V-12V |
| Agriculture | Valvae imperium, seminis machinationes | Ip-aestimavit vermem vel planetam, 12V-24V |
| Building Automation | HVAC dampers, actus caeci, ianuam expellit | Brugis helica vel vermis, 24V |
Motores DC calces operationi celeritati variabiles bene conveniunt quia celeritas DC motoris directe proportionalis intentioni applicatae est. Re, celeritas tribus modis uno regitur.
PWM norma est modus moderandi motores calces DC refrenandi a microcontrolers, PLCs et motoriis ICs. Agitator permutat copiam motoris interdum ad certam frequentiam — typice 1-20 kHz — et officium cycli (quotustus temporis copia est) mediocris intentione determinat et ideo velocitatem. A 50% officium cycli ad 12V tradit circiter 6V aequipollens motori. PWM imperium efficax est quod commutatio transistorum maximam temporis sui tempus plene in vel plene absumit, damna resistiva extenuando. PWM frequentiae infra 1 kHz facere possunt stridorem mobilem audibilem sicut ambages armatura in commutatione frequentiorum vibrantium; frequentiis supra 20 kHz dis hoc super audibile patens. Pro motoribus calces DC reiectis, frequentia PWM 10-20 kHz est communis electio practica.
Pro applicationibus accuratam requirentibus, constantem celeritatem respectu oneris variationis - suggestae roboticae, taenia agitet, praecisio dispensat - ecoder gyratorius ascendens in motore stipite vel gearbox output praebet celeritati reali-tempus feedback ad PID moderatoris. Moderator celeritatem actui cum statuto comparat et officio cycli PWM aptat ad restitutionem. Encoders pro motoribus calces DC typice quadraturae optici vel magnetici typi effecti aulae, cum resolutionibus ab 6 ad plura milia comitum per revolutionem pendentium ex praecisione requiruntur. Multa DC calces motoria praebitorum integrata encoder optiones offerunt ut vexillum catalogue items, simplifying hardware integrationis signanter.
In systematibus simplicibus ubi onus relative constans est et celeritas subtilitas critica non est, celeritas potest componi copiam intentionis cum copia variabili DC potentiae vel moderantis intentionis linearis. Aditus hic minimus efficiens est - moderator linearis guttae intentionis sicut calor dissipat - nec onus recompensationem praebet, sed simplicissima est exsecutio et apta est ad probationes scamna, celeritatem manualem accommodationes, ac nimis humilis applicationes virtutis, ubi scelerisque dissipatio in moderatore cura non est.
Intellectus quid tandem causat a DC calces motoris deficere, adiuvat te excogitare systemata quae opera intervalla extendunt et problemata capiunt antequam tempus inconditum causant.
Quisque sit amet nisl. Required agri notata *
Copyright © Zhejiang Dongzheng Motor Co.,Ltd. All Rights Reserved.
 Motor Fabricante Apparatus DC
Motor Fabricante Apparatus DC